Vigilant Aerospace CEO Kraettli Epperson recently presented a brief online presentation discussing our participation in the National Aeronautics and Space Administration (NASA) University Leadership Initiative (ULI) WindMap project lead by Oklahoma State University.
Here’s more about the WindMap project:
NASA ULI WindMap Project Vigilant Aerospace Briefing
From the video:
Hi, I’m Kraettli Epperson, CEO of Vigilant Aerospace Systems in Oklahoma City. I’m going to be talking about our participation in the NASA ULI WindMap Project, which is being led by Oklahoma State University.
We are a commercial partner in this project and will be providing software and systems to utilize the research and development that is emerging from this project.
Company Background
Now a little bit of background about us. The company is called Vigilant Aerospace Systems and we develop aerospace management and detect-and-avoid safety systems for unmanned aircraft.
Our technology is based on two licensed NASA patents and was originated by Ricardo Arteaga at NASA Armstrong in California. The system provides avoidance as a baseline function for our displaying system. It’s based on multiple projects and papers that we’ve published with NASA Armstrong and with Oklahoma State University and others.
The company has been a participant in the FAAs Integration Pilot Program. And, is now in the BEYOND Program with two teams in the United States, including North Dakota and Alaska.
The company is also a current participant in the FAAs beyond visual line-of-sight Aviation Rulemaking Committee (FAA ARC), which is working on new rules for long range flight of unmanned aircraft in the US.
The company has offices in Fargo and Oklahoma City.
FlightHorizon Detect-and-Avoid System
I’m going to take a few minutes to talk about how our system works, how our software works, so that you can understand how the integration of wind and weather hazard into this system will be especially useful for unmanned aircraft and eventually probably for manned aircraft as well.
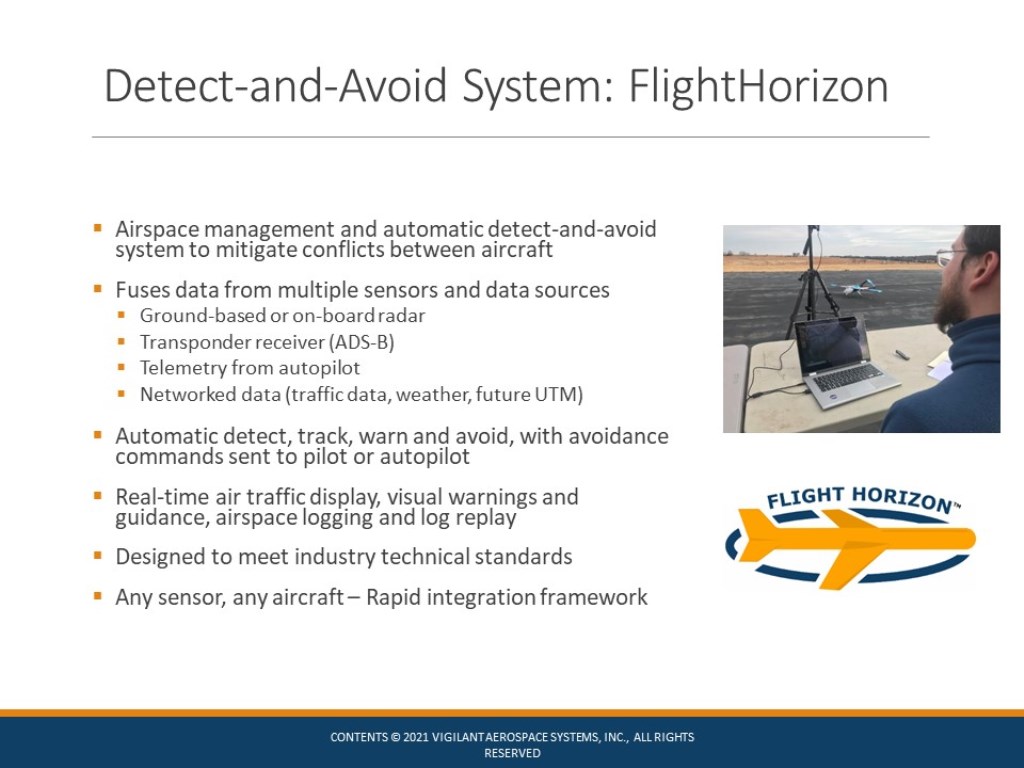
Our system is an airspace management system with automatic detect-and-avoid built-in to allow unmanned aircraft or remote pilots to automatically avoid encounters and conflicts with other air traffic and especially manned aircraft.
The system fuses data from ground-based and on-board radar, fuses data from transponder receivers, including ADS-B, telemetry from the autopilot on the remote aircraft, and then networked data – so, traffic data, weather data, and in the future data from UTM systems with which it will integrate.
The system provides an automatic process to detect, track, display, warn, and avoid on air traffic with avoidance commands sent to the pilot, or eventually directly to the autopilot. The system provides real-time air traffic display, visual warnings and guidance along with airspace logging, flight logging, and other forms of data recording.
It’s designed to meet industry technical standards and it’s designed to be aircraft and sensor agnostic so that new data sources, sensors can be integrated into the software and the software can be used with a wide variety of aircraft based on the configuration of the software for that aircraft.
Pictured below is a screenshot of the user interface for the Aerospace Management System. And I’ll use this to explain a little bit about how the software works and how it thinks about the airspace. In the center of this screenshot you’ll see, there is a white aircraft.
This is the remotely piloted aircraft, around that aircraft is a yellow cylinder. This is a hockey puck shape. This is the well clear distance that the unmanned aircraft is typically required to remain from other air traffic or other air hazards.
In the left-hand, upper left of the screenshot, you will see detected incoming air traffic. This would be a manned aircraft that’s been detected by one of the sensors, transponder receiver or radar, and the software has then calculated that there will be a loss of well clear. So there is a red warning box at the top here with a specific avoidance command, a resolution advisory that says speed up, turn left within 19 seconds. The software begins counting that down. It provides an audible warning.
You’ll also see that there are blue lines extending from both of these air targets. Both of these are the trajectory predictions that the software is making and using to determine that there could be a loss of well clear. So as the system goes forward, the two aircraft will approach each other. The command hopefully will be taken by the remote pilot and the loss of well clear can be prevented. This is a moving map. It will track ownship as it flies across the landscape and it will allow you to see where your aircraft is located and then to track the other air traffic around that aircraft.
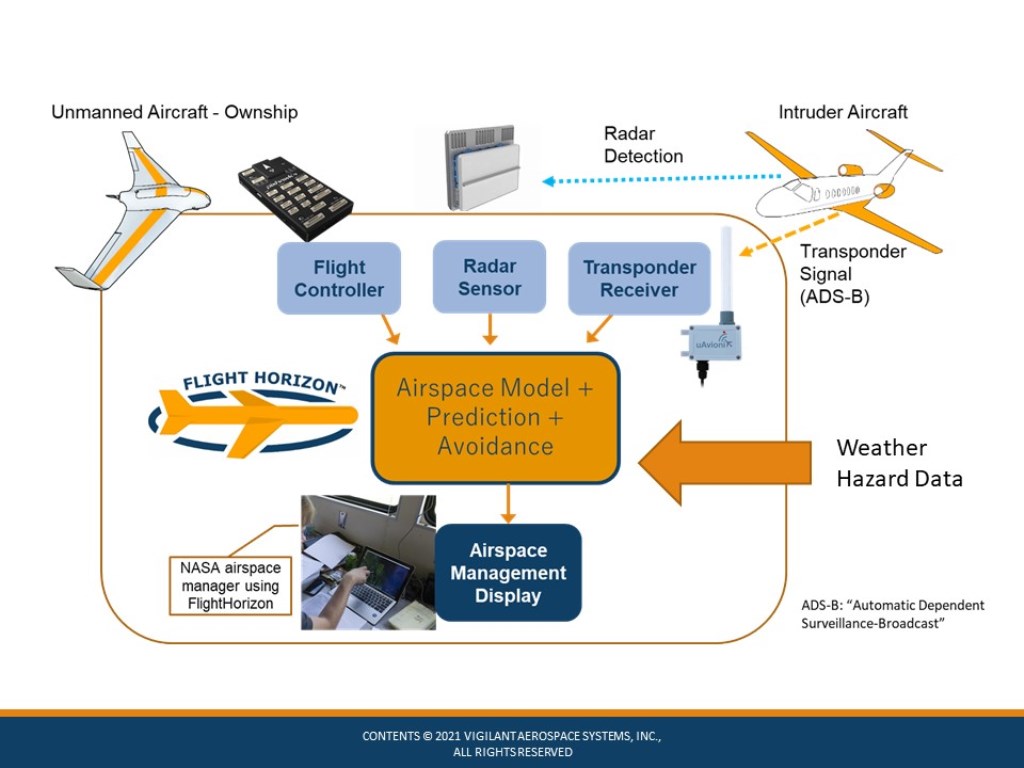
Below is a diagram that we’ll use to quickly explain a little bit more about how the system works and where it is receiving data from. In the center in the orange box is the FlightHorizon software.
On the upper left is the autopilot that is providing telemetry about the status and location of the remote aircraft. On the right hand side is a transponder receiver, which is receiving information from manned aircraft transponders, providing information about where those aircraft are located. And then in the middle is a radar, this is used to detect non-cooperative manned aircraft that are not using a transponder.
All three of these data sources provide a live continuous data stream to the software, which it uses to model the airspace, to track and display the aircraft, and then to provide predictions and avoidance commands when necessary. This information is then used in the airspace management display. In this case, this is a NASA airspace manager who’s actually using the interface here for some flight tests. And the entire system provides that information to that airspace manager or to the remote pilot.
The expectation for this project is that we will also bring in weather hazard data that is generated by this research so that data can be classified and then used to create weather hazard areas, wind hazard areas in the software that can be avoided in the same way that we use the software to avoid air traffic.
Mentioned below are some recent projects that the company has participated in. I’ll just highlight a few that I think are relevant to this project:
In particular, the NASA Quiet Supersonic Program and other supersonic research programs have been very useful in testing and using our software in the field. We also have ongoing work with the supersonic program through 2026.
At this point, we’ve also completed a project with Oklahoma State University to do radar integration of a particular radar, and then to do extensive testing of that radar with Unmanned Systems Research Institute at OSU, some of these pictures are from that work, and that’s been a very fruitful relationship.
We’ve recently done a project for the FAA, an R&D contract to develop our system and begin to test it in beyond visual line-of-sight flight testing, particularly along the Trans-Alaska Pipeline with an onboard system. And then we have ongoing work with FAA BEYOND Programs in Alaska and North Dakota and ongoing detect-and-avoid use of our system as a safety system in a variety of programs.
Goals for WindMap Project Participation
I’m very briefly going to go over our goals for participation in the WindMap Project. We have really just started on our portion of this project, began to meet with the research and development participants, begin to understand what type of data they’re producing, what type of wind sampling they’re doing, and begin to think about how we can integrate that data into our safety system.
The very first goal would be data collection and display in our system. The collection classification of data into wind or weather hazard areas, mapping of that data, and then integration into the dynamic moving aviation map. So it can be used by remote pilots.
Next would be create of wind hazard avoidance areas, the same way that we avoid air traffic. We would want to be able to create wind hazard or weather hazard areas in the air space that we can then use to provide automatic avoidance processes for.
After we have the creation of those hazard areas, we would then write the portions of software to generate automatic resolution advisories, to allow remote pilots and eventually, maybe manned pilots to avoid those areas with the same sort of warnings that we would provide for air traffic.
Ultimately, this system with the wind and weather hazard integrated data would be deployed through the same system that we use to deploy our software now. This is a distributed service with a distributed infrastructure, so it can be cloud-based and can be used remotely over a web browser or it can be installed locally on a server. And the data can be delivered locally from sensors, either on-board aircraft or at a facility.
We would also expect to be using this data with our on-board version of our system. This would allow this wind and weather hazard data to be integrated with an overall existing airspace management and safety system that’s being deployed and used in industry.
Next Steps for WindMap Participation
Finally, I’m going to discuss the next steps and the processes that we expect to go through as we participate in this project with the ultimate goal of being able to consume, and then use this data in actual field system for safe flight of unmanned aircraft.
Develop the data structures and the data transmission/storage processes needed to bring the wind and weather hazard data into this system.
Develop and test the system with logged data, not live data, but to begin to use logged hazard data in the system in a simulation mode in order to demonstrate how it can be used in the real world.
Integration of live weather hazard and data sources as a third step to begin to move towards field use of the system.
We would then work on mapping and display of the hazard areas in the system so that they are fully integrated with the airspace map, then development of avoidance calculations and commands. So, how the system would determine that a particular hazard or area is an area of concern for the remote pilot, and to then provide an avoidance command using the same process that we do now to avoid air traffic.
Integration and testing of the whole integrated system in a simulated environment.
Field testing with small unmanned aircraft, and then moving towards field testing with larger unmanned aircraft and ultimately of course, integration in field testing with adverse weather conditions. So, the system can actually be used in the field with wind and weather hazards with unmanned aircraft.
Thank you for allowing us to present on our participation in this NASA ULI project. And we would welcome any questions that you might have, feel free to contact us directly using the information on the screen or to contact us through OSU and Jamey Jacob, Unmanned Systems Research Institute.
About the OSU Unmanned Systems Research Institute
Unmanned vehicles have become a revolutionary technology that is taking the world by storm. The OSU Unmanned Systems Research Institute (USRI) accesses expertise across Oklahoma State University allowing them to combine cutting edge product development with academic knowledge and resources to create unique solutions to critical problems. For more information on the OSU Unmanned Systems Research Institute, visit CEAT.okstate.edu/USRI.
About Vigilant Aerospace Systems
Vigilant Aerospace is the leading developer of detect-and-avoid and airspace management software for uncrewed aircraft systems (UAS or drones). The company’s product, FlightHorizon, is based on two NASA patents and uses data from multiple sources to display a real-time picture of the air traffic around a UAS and to provide automatic avoidance maneuvers to prevent collisions. The software is designed to meet industry technical standards, to provide automatic safety and to allow UAS to safely fly beyond the sight of the pilot. The software has won multiple industry awards and the company has had contracts and users at NASA, the FAA, the U.S. Department of Defense and with a variety of drone development programs. Visit our website at www.VigilantAerospace.com
About Vigilant Aerospace Systems
Vigilant Aerospace is the leading developer of multi-sensor detect-and-avoid and airspace management software for uncrewed aircraft systems (UAS or drones). The company’s product, FlightHorizon, is based on two NASA patents and uses data from multiple sources to display a real-time picture of the air traffic around a UAS and to provide automatic avoidance maneuvers to prevent collisions. The software is designed to meet industry technical standards, to provide automatic safety and to allow UAS to safely fly beyond the sight of the pilot. The software has won multiple industry awards and the company has had contracts and users at NASA, the FAA, the U.S. Department of Defense and with a variety of drone development programs. Visit our website at www.VigilantAerospace.com
 The system fuses data from ground-based and on-board radar, fuses data from transponder receivers, including ADS-B, telemetry from the autopilot on the remote aircraft, and then networked data – so, traffic data, weather data, and in the future data from UTM systems with which it will integrate.
The system provides an automatic process to detect, track, display, warn, and avoid on air traffic with avoidance commands sent to the pilot, or eventually directly to the autopilot. The system provides real-time air traffic display, visual warnings and guidance along with airspace logging, flight logging, and other forms of data recording.
It’s designed to meet industry technical standards and it’s designed to be aircraft and sensor agnostic so that new data sources, sensors can be integrated into the software and the software can be used with a wide variety of aircraft based on the configuration of the software for that aircraft.
Pictured below is a screenshot of the user interface for the Aerospace Management System. And I’ll use this to explain a little bit about how the software works and how it thinks about the airspace. In the center of this screenshot you’ll see, there is a white aircraft.
The system fuses data from ground-based and on-board radar, fuses data from transponder receivers, including ADS-B, telemetry from the autopilot on the remote aircraft, and then networked data – so, traffic data, weather data, and in the future data from UTM systems with which it will integrate.
The system provides an automatic process to detect, track, display, warn, and avoid on air traffic with avoidance commands sent to the pilot, or eventually directly to the autopilot. The system provides real-time air traffic display, visual warnings and guidance along with airspace logging, flight logging, and other forms of data recording.
It’s designed to meet industry technical standards and it’s designed to be aircraft and sensor agnostic so that new data sources, sensors can be integrated into the software and the software can be used with a wide variety of aircraft based on the configuration of the software for that aircraft.
Pictured below is a screenshot of the user interface for the Aerospace Management System. And I’ll use this to explain a little bit about how the software works and how it thinks about the airspace. In the center of this screenshot you’ll see, there is a white aircraft.
 This is the remotely piloted aircraft, around that aircraft is a yellow cylinder. This is a hockey puck shape. This is the well clear distance that the unmanned aircraft is typically required to remain from other air traffic or other air hazards.
In the left-hand, upper left of the screenshot, you will see detected incoming air traffic. This would be a manned aircraft that’s been detected by one of the sensors, transponder receiver or radar, and the software has then calculated that there will be a loss of well clear. So there is a red warning box at the top here with a specific avoidance command, a resolution advisory that says speed up, turn left within 19 seconds. The software begins counting that down. It provides an audible warning.
You’ll also see that there are blue lines extending from both of these air targets. Both of these are the trajectory predictions that the software is making and using to determine that there could be a loss of well clear. So as the system goes forward, the two aircraft will approach each other. The command hopefully will be taken by the remote pilot and the loss of well clear can be prevented. This is a moving map. It will track ownship as it flies across the landscape and it will allow you to see where your aircraft is located and then to track the other air traffic around that aircraft.
Below is a diagram that we’ll use to quickly explain a little bit more about how the system works and where it is receiving data from. In the center in the orange box is the FlightHorizon software.
This is the remotely piloted aircraft, around that aircraft is a yellow cylinder. This is a hockey puck shape. This is the well clear distance that the unmanned aircraft is typically required to remain from other air traffic or other air hazards.
In the left-hand, upper left of the screenshot, you will see detected incoming air traffic. This would be a manned aircraft that’s been detected by one of the sensors, transponder receiver or radar, and the software has then calculated that there will be a loss of well clear. So there is a red warning box at the top here with a specific avoidance command, a resolution advisory that says speed up, turn left within 19 seconds. The software begins counting that down. It provides an audible warning.
You’ll also see that there are blue lines extending from both of these air targets. Both of these are the trajectory predictions that the software is making and using to determine that there could be a loss of well clear. So as the system goes forward, the two aircraft will approach each other. The command hopefully will be taken by the remote pilot and the loss of well clear can be prevented. This is a moving map. It will track ownship as it flies across the landscape and it will allow you to see where your aircraft is located and then to track the other air traffic around that aircraft.
Below is a diagram that we’ll use to quickly explain a little bit more about how the system works and where it is receiving data from. In the center in the orange box is the FlightHorizon software.
 On the upper left is the autopilot that is providing telemetry about the status and location of the remote aircraft. On the right hand side is a transponder receiver, which is receiving information from manned aircraft transponders, providing information about where those aircraft are located. And then in the middle is a radar, this is used to detect non-cooperative manned aircraft that are not using a transponder.
All three of these data sources provide a live continuous data stream to the software, which it uses to model the airspace, to track and display the aircraft, and then to provide predictions and avoidance commands when necessary. This information is then used in the airspace management display. In this case, this is a NASA airspace manager who’s actually using the interface here for some flight tests. And the entire system provides that information to that airspace manager or to the remote pilot.
The expectation for this project is that we will also bring in weather hazard data that is generated by this research so that data can be classified and then used to create weather hazard areas, wind hazard areas in the software that can be avoided in the same way that we use the software to avoid air traffic.
Mentioned below are some recent projects that the company has participated in. I’ll just highlight a few that I think are relevant to this project:
In particular, the NASA Quiet Supersonic Program and other supersonic research programs have been very useful in testing and using our software in the field. We also have ongoing work with the supersonic program through 2026.
At this point, we’ve also completed a project with Oklahoma State University to do radar integration of a particular radar, and then to do extensive testing of that radar with Unmanned Systems Research Institute at OSU, some of these pictures are from that work, and that’s been a very fruitful relationship.
We’ve recently done a project for the FAA, an R&D contract to develop our system and begin to test it in beyond visual line-of-sight flight testing, particularly along the Trans-Alaska Pipeline with an onboard system. And then we have ongoing work with FAA BEYOND Programs in Alaska and North Dakota and ongoing detect-and-avoid use of our system as a safety system in a variety of programs.
On the upper left is the autopilot that is providing telemetry about the status and location of the remote aircraft. On the right hand side is a transponder receiver, which is receiving information from manned aircraft transponders, providing information about where those aircraft are located. And then in the middle is a radar, this is used to detect non-cooperative manned aircraft that are not using a transponder.
All three of these data sources provide a live continuous data stream to the software, which it uses to model the airspace, to track and display the aircraft, and then to provide predictions and avoidance commands when necessary. This information is then used in the airspace management display. In this case, this is a NASA airspace manager who’s actually using the interface here for some flight tests. And the entire system provides that information to that airspace manager or to the remote pilot.
The expectation for this project is that we will also bring in weather hazard data that is generated by this research so that data can be classified and then used to create weather hazard areas, wind hazard areas in the software that can be avoided in the same way that we use the software to avoid air traffic.
Mentioned below are some recent projects that the company has participated in. I’ll just highlight a few that I think are relevant to this project:
In particular, the NASA Quiet Supersonic Program and other supersonic research programs have been very useful in testing and using our software in the field. We also have ongoing work with the supersonic program through 2026.
At this point, we’ve also completed a project with Oklahoma State University to do radar integration of a particular radar, and then to do extensive testing of that radar with Unmanned Systems Research Institute at OSU, some of these pictures are from that work, and that’s been a very fruitful relationship.
We’ve recently done a project for the FAA, an R&D contract to develop our system and begin to test it in beyond visual line-of-sight flight testing, particularly along the Trans-Alaska Pipeline with an onboard system. And then we have ongoing work with FAA BEYOND Programs in Alaska and North Dakota and ongoing detect-and-avoid use of our system as a safety system in a variety of programs.

{kind=link}