Vigilant Aerospace Systems’ CEO Kraettli Epperson recently presented at the 2021 AUVSI & SAE Business of Automated Mobility (BAM) Forum in a panel session titled “Developing & Testing a Real-World BVLOS Multi-Sensor DAA System for Unmanned Aircraft Systems” on June 24, 2021.
The inaugural BAM Forum was a 2-day virtual event in June 2021 focused on bringing mobility professionals together to create an actionable roadmap towards building the future of mobility through keynote presentations, panels, roundtable discussions, networking sessions, and on-demand technical presentations and papers.
For those who missed our presentation, here are some highlights:
a 2021 SAE Business of Automated Mobility (BAM) presentation:
Developing & Testing a Real-World BVLOS Multi-Sensor DAA System for Unmanned Aircraft Systems
Introduction

Hi, I’m Kraettli Epperson, CEO of Vigilant Aerospace Systems. I’m going to be talking today about developing and testing real world beyond visual line of sight detect-and-avoid for unmanned aircraft systems.
During this presentation, we’re going to provide an introduction to what detect, and avoid is, and how these systems are used. We’re going to talk about the fundamental requirements of a detect-and-avoid system. We’re going to talk about the components of a detect-and-avoid system, including the hardware and software that’s used to compose a system. We’re going to talk about some specifics of the technology. We’re going to talk about the technical standards in the industry that are emerging and some of the trends and emerging regulations that govern these systems and how they can be used with unmanned aircraft.
Then we’re going to talk about some specific projects and testing that we have conducted recently in the development of our detect-and-avoid system. And finally, we’re going to conclude with a discussion about some industry next steps and emerging trends in the industry.
What is a Detect-and-Avoid System?
So what is a detect-and-avoid system? A detect-and-avoid system is a system made up of hardware, and software that allows an unmanned aircraft to detect manned aircraft when flying beyond the visual line of sight of the pilot. This is a system that is a fundamental safety requirement meant for the integration of unmanned aircraft into a national airspace, and is needed to maintain the correct well clear distances from manned aircraft.
Well clear distance is a distance that an unmanned aircraft must remain away from a manned aircraft in order to prevent causing a hazard to the manned aircraft. These systems must be able to detect both cooperative aircraft. These are manned aircraft that are carrying an air traffic control transponder and actively transmitting their position, and also non-cooperative aircraft. Aircraft that are not carrying a transponder are likely not required to carry a transponder in the airspace in which they’re flying, but may also encounter an unmanned aircraft. And the detect-and-avoid system needs to be able to track both aircraft.
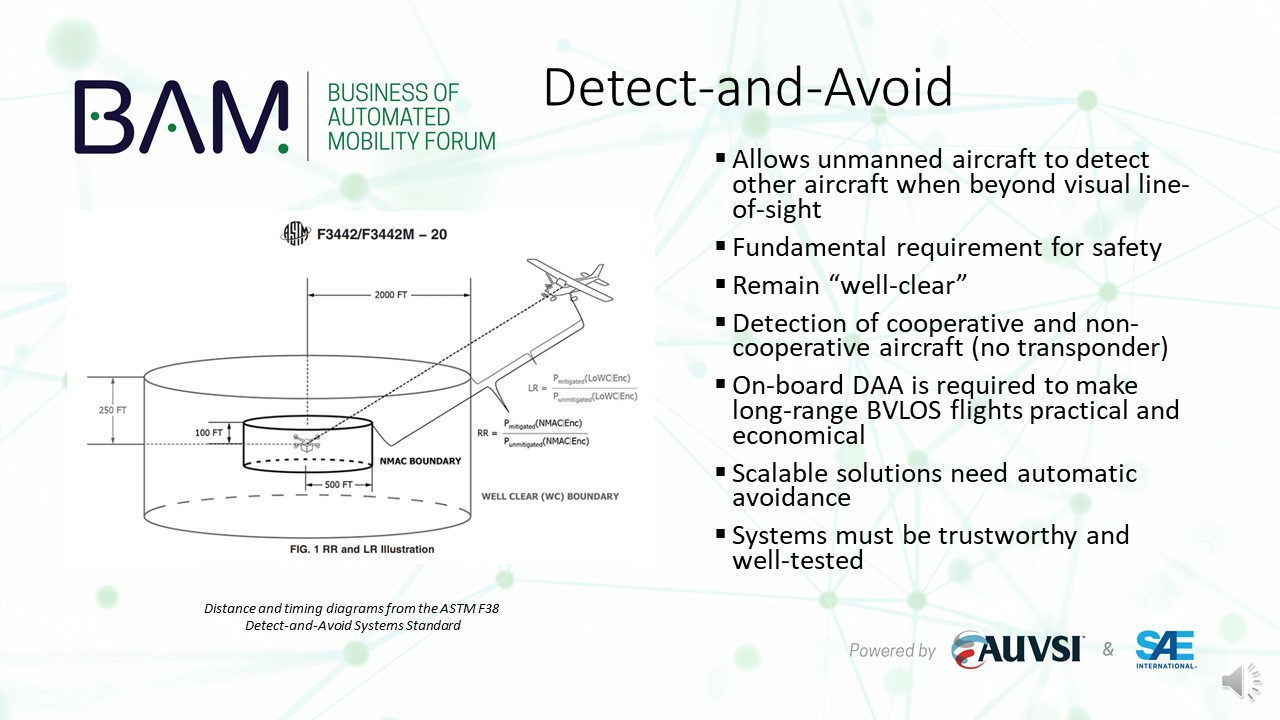
In addition, onboard detect-and-avoid is likely to be required to make long range beyond visual line-of-sight flights economical. This is particularly true in situations in which a larger ground-based radar, or even a string of radars may not be practical to surveil the airspace and track all of the air traffic over a long range. These systems also need to be scalable, and thus they need to provide automatic avoidance, so that one or a small group of pilots possibly in a command center can run multiple unmanned aircraft, and know that they will be carrying out the avoidance commands automatically. And finally, these systems must be highly trustworthy and well tested, because they are a critical part of the safe integration of the unmanned aircraft into the national airspace.
Characteristics and Requirements of a Detect-and-Avoid System
What are some additional characteristics and fundamental requirements of a detect-and-avoid system in order for it to be able to perform its functions?
First, it has to be able to detect noncooperative aircraft. This is a critical problem in the industry, particularly for small unmanned aircraft. The requirement is for the aircraft or a ground-based system, that’s providing the service to be able to detect noncooperative aircraft that are not participating in air traffic control. As we’ll discuss further in this presentation, this usually means the use of a radar or optical detection device, either on the aircraft or on the ground to provide this non-cooperative detection.
In addition, the system has to be able to track targets. It has to be able to detect them and track them over time. It has to be able to calculate a potential loss of well clear. So, it has to use those tracks and be aware of the location of the unmanned aircraft, the own ship, so that it can know the distance and range to the manned aircraft that it’s tracking. Then, the system has to be able to calculate an avoidance maneuver, has to be able to do this quickly and accurately to provide the command, to carry out the avoidance maneuver once a loss of well clear potential is calculated.
Additionally, it must be able to calculate these avoidance commands in a way that fits within the performance envelope of the unmanned aircraft. This is very important, and so these systems have to have the performance characteristics of the unmanned aircraft as part of their calculations.
After the avoidance maneuver has been carried out, the system has to help the aircraft to regain well clear, so ensure that it has either maintained or regained well clear and then avoid additional conflict. So, you don’t want a system that is providing an avoidance maneuver that then creates an additional conflict with another aircraft, or is able to respond to that if it does. And then finally the system needs to be able to release the unmanned aircraft back to its planned flight so that it can continue on its way.
Components of a Detect-and-Avoid System
We’re going to talk for a few minutes about the detect-and-avoid system components that are typically a part of a detect-and-avoid system.
The first components we’re going to talk about are the sensors. These are used to allow the detect-and-avoid system to detect and track noncooperative aircraft. These would include oftentimes they radar and electro-optical optical or infrared system, acoustic systems are used. Sometimes these are used in cooperation with other sensors to provide a broader range of detection. And then other systems, including LIDAR are being explored a detect-and-avoid system must take into account display and human factors to keep the remote pilot in command aware of what the detect-and-avoid system is detecting and what it may be doing if it has the autonomy.
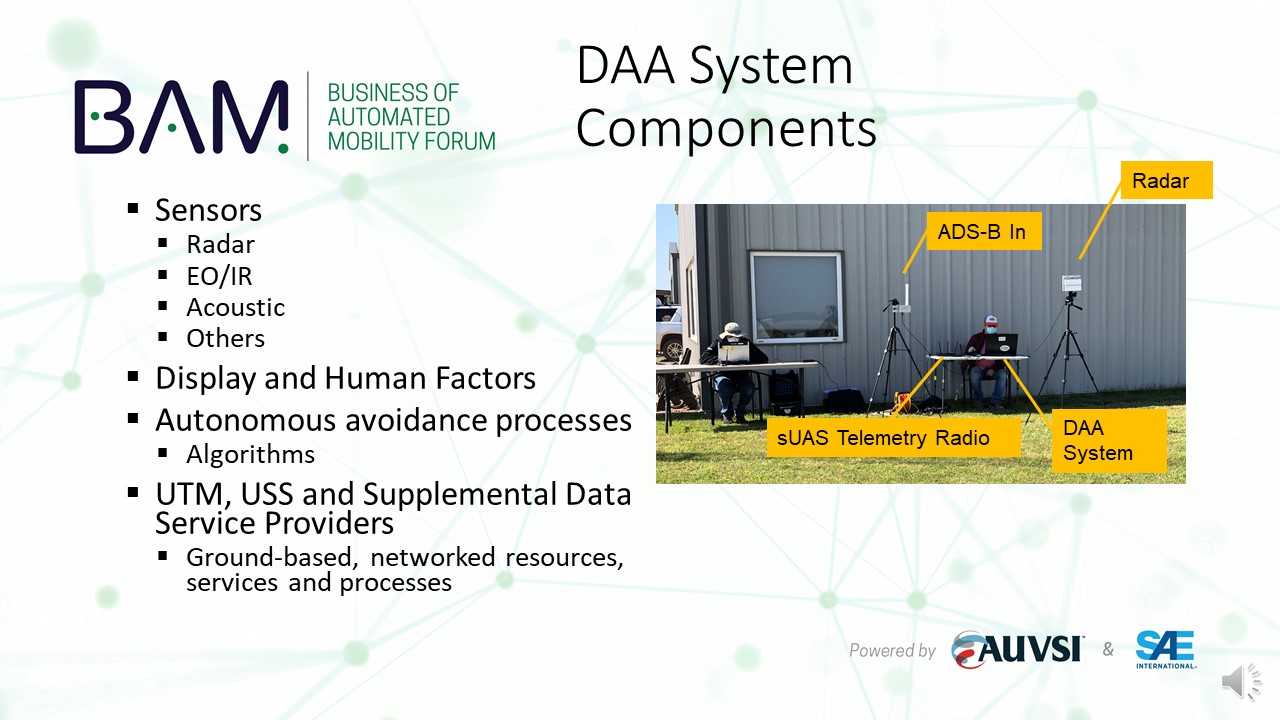
The detect-and-avoid system must be able to calculate the loss of well clear potential, and then an avoidance maneuver. This involves the use of a variety of algorithms, which we’ll discuss in a little more detail later. Then finally, a component that’s emerging would be the use of an unmanned aircraft traffic management system, an unmanned service supplier that supplies services for that UTM or other sorts of supplemental data service providers like ground-based radars, other networked resources that are allowing the tracking or self-reporting of location of manned and unmanned aircraft, FAA, data sources, and other other data sources that are feeding the system from the ground. All of these components are important and can be used in combination to create an effective system.
I’m going to highlight some common components that are used, and these are components that we use in the development of our system. They’re common across many detect-and-avoid systems.
On the left-hand side, you’ll see here, a uAvionix PingStation. This is an ADS-B receiver that is used in the field to receive aircraft transponders signals from manned aircraft, that’s fed into the system. In the middle, here, is an Echodyne EchoGuard radar. This is a portable radar that’s used to detect aircraft. It can be used to detect a noncooperative aircraft over several kilometers. Then on the right-hand side is an autopilot.
This is a very common model of autopilot that can provide information to the detect-and-avoid system about the location of the unmanned aircraft. Usually using a telemetry stream, that’s coming over the command and control radio either directly or through the ground control station to the detect-and-avoid system. Combined together, these components make up a full detect-and-avoid system.
This is a diagram of a typical configuration of the flight horizon detect-and-avoid system. This is our company’s system, it’s a software that integrates with the hardware that’s being described here.
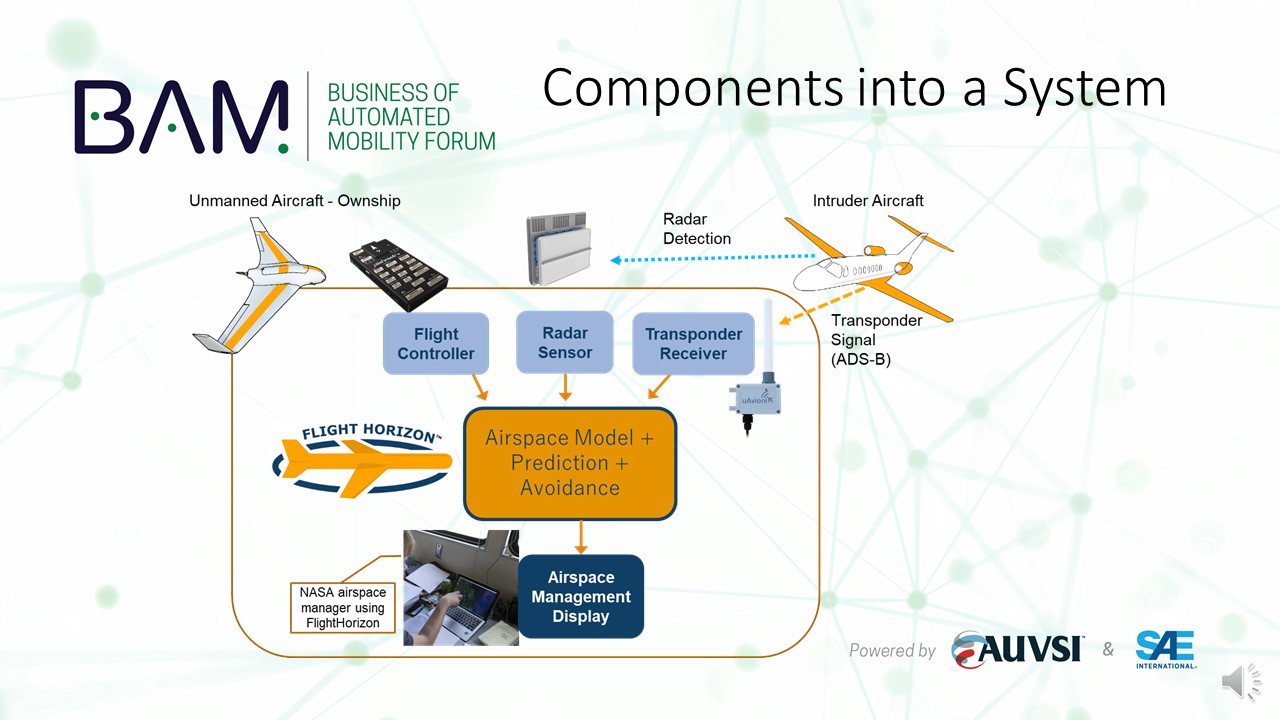
On the left-hand side, you would have your unmanned aircraft. This is called Ownship. This is the aircraft that you’re responsible for, and that you are responsible for maintaining a well clear distance from the manned aircraft. You’ll see here on the left hand side, the flight controller that is feeding information into the orange box in the middle, which is the software that’s collecting the information from the autopilot and all the sensors and creating the airspace model, the prediction of a loss of well clear, and then providing the avoidance maneuver either to the pilot or to the autopilot.
In the middle here at the top, you’ll see a radar. This radar is providing detection and tracking of manned aircraft that may be entering the airspace. They may not have a transponder and it allows the system to be aware of those aircraft, to track them over time and put them into the airspace model.
Then, on the right-hand side, you’ll see the transponder receiver, this is for receiving the signals from cooperative aircraft that do have a transponder and are providing their position to the system. All of that comes into the detect-and-avoid system, and it is used to update the display continuously, and it is used to calculate and then provide the avoidance maneuver that’s required to keep the unmanned aircraft, the well clear distance from the manned aircraft.
This is a screenshot from a display from the flight horizon detect-and-avoid system. This is an example of an encounter that an unmanned aircraft might have with a manned aircraft, looking at a screenshot like this is a good way to understand what the software is doing, what a detect-and-avoid system has to calculate in order to perform its function, in the left center of the screen here, you’ll see a small white aircraft. That’s your unmanned aircraft, your Ownship.
We call this our synthetic cockpit view because this is a 3D view of the airspace. And you’ll see that there’s a large yellow ring around the unmanned aircraft, that’s the well clear ring. And that’s a visual representation of that well clear distance that the unmanned aircraft is required to maintain from the manned aircraft. That is a distance that is calculated to allow the unmanned aircraft not to create a hazard for the manned aircraft.
In this screenshot, you’ll see that on the right-hand side, there’s a small blue aircraft. The software is calculating where that small blue manned aircraft is going to be over the next few seconds and minutes. And it’s determined that there is a potential loss of well clear and a conflict between those two aircraft. As a result, the software is now displaying a potential collision, so that’s the large red ring there, and it is instructing the pilot and potentially the autopilot to perform an avoidance maneuver in order to maintain well clear from this other aircraft. It’s providing this in three ways. It provides a text that says there is a collusion possible in 20 seconds. It is saying ascend. It is saying this audibly so that the remote pilot in command can hear that. And it’s also providing this green line that you can see on the screen with very specific instructions on how to perform that maneuver. This is an important function for a detect-and-avoid system to provide that information continuously to the remote pilot in command.
Detect-and-Avoid Algorithms
Now we’re going to talk about some of the algorithms that are used in detect-and-avoid systems. In particular, we’re going to talk about the NASA Stratway and DAIDALUS algorithm. This is a set of algorithms and software that NASA has developed, and that we use on our system that allows an unmanned aircraft and the software to calculate where aircraft are going to be calculate trajectories, calculate potential distances and loss of well clear between two aircraft. And then also come up with an avoidance advisory that can be performed to maintain the well clear distance that you’ve told that algorithm that you want to maintain. It’s sensitive to the performance characteristics of the aircraft and has been used at NASA extensively.
In addition, there’s a new system from the FAA called ACAS X. This is a successor to the TCAS system, the collision avoidance system, that has been used in the United States for a long time now. ACAS X is a system that is designed to provide collision avoidance for all kinds of aircraft. There’s several versions. They ACAS sXu version is a piece of software that is designed for small unmanned aircraft.
This is the new system that has been extensively tested by the FAA and is being integrated into industry standards now. And then we’ll provide, ultimately, a means of compliance with a set of standards around collision avoidance. We’re really excited about this and excited to be integrating this into our system, which we’re doing right now.
Detect-and-Avoid Technical Industry Standards
I’m going to talk briefly about the industry technical standards that are emerging to really govern and guide the development of detect-and-avoid systems, both in how you develop them and then how you use them and how you might use them in a certification process for unmanned aircraft. There’s a lot on this page. I’m just really going to highlight these, make you aware that they exist. And then we’ll move on to the next topic here.
So, ASTM has developed several standards. The one that is of the most interest to this presentation is the new 2020 standard specification for detect-and-avoid system performance requirements. This is a standard, particularly, for small unmanned aircraft and it defines detective avoid system needs to do. And how you would use that detect-and-avoid system with a small unmanned aircraft.
There are some other standards from ASTM, which impact the way that you would develop a detect-and-avoid system. Things like ensuring the dependability of the software. There are also standards emerging for the supplemental data service providers. This would be a ground-based usually service provider who is feeding data into critical safety systems, like an unmanned traffic management system. There is work going on for a test method for detecting avoid systems to establish that a particular DAA meets the performance standard.
Then of course there are UTM standards emerging. So there is work going on with the unmanned traffic management system to ensure interoperability between UTM service providers.
In addition, for larger unmanned aircraft, the RTCA has several standards, and I know that several more are being worked on there is a minimum operational performance standards for detect-and-avoid systems generally that merged from the C-228 committee. And that is a published standard. And there have been updates to that standard that helps to define the systems that you would use on a large unmanned aircraft.
There are also standards for air to air radar for traffic surveillance, and then emerging now is [RTCA] Special Committee 147 is working on a new vision version of a standard for ACAS X for the collision avoidance system, so that there can also be a certification path for the use of devices that are intended to provide ACAS X. Now we’re going to switch over to talking a little bit about testing of detect-and-avoid systems, the different types of testing that you do on a detect-and-avoid system and the components and the considerations that you might have when doing this type of testing.
Testing DAA Systems
Testing is obviously very important for a safety critical component, like a detect-and-avoid system. And it is only when a complete field test can be conducted, that you can begin to have assurance that the system is doing what you want it to do, and that it is ready to provide the function that it needs to provide. So testing types: There are a couple of different testing types that we are involved in, and that are common across the industry. One is sensor performance testing.
The sensors that are intended to be used with your system have to have a certain level of performance to be effective, and so they’re tested for that. And then encounter testing where you are actually using the system using a fully integrated system with software and hardware and are simulating actual encounters that would trigger the system, and require that it perform its function and provide the avoidance maneuver. So with the sensors, you’re testing for things like range, accuracy, and how the sensor is able to handle clutter, and able to provide filtering of data. That the information that is provided to the detect-and-avoid software is the information that’s needed and does not create a lot of false tracks and generate a lot of noise in the system. This testing is performed in order to establish a baseline system performance, first with the sub components, and then with the system overall, this information can then be fed back into a simulation process. So you take the real field data, and you can run simulations with large encounter sets, hundreds of thousands, or even millions of encounters.,
Oftentimes encounter sets are made up of real aircraft and traffic surveillance data. This is very useful to take information about the sensor and the detect-and-avoid system, and then be able to simulate hundreds of thousands or millions of encounters with the information you’ve collected from field testing, and then go back and forth to be able to then test in the field again, based on what you learned from your simulation about cases that the system does not handle as well, for example, and improve the system. So, this is a great feedback loop to improve the system, going from field tests to simulations, to field test.
Ultimately, this allows you to use this information to establish a specific safety case in which the detect-and-avoid system provides an appropriate level of risk mitigation, and safety for the type of aircraft, the type of airspace and the type of flight operation that you want perform.
Speaking of field testing, here’s some photos from some recent field flight testing that we’ve performed with a detect-and-avoid system using a variety of sensors to feed data into the detect-and-avoid system and begin to measure the performance of these sensors and the performance of the overall system. I’m going to highlight for you some of the components in this actual field test that I’ve spoken about earlier in this presentation.
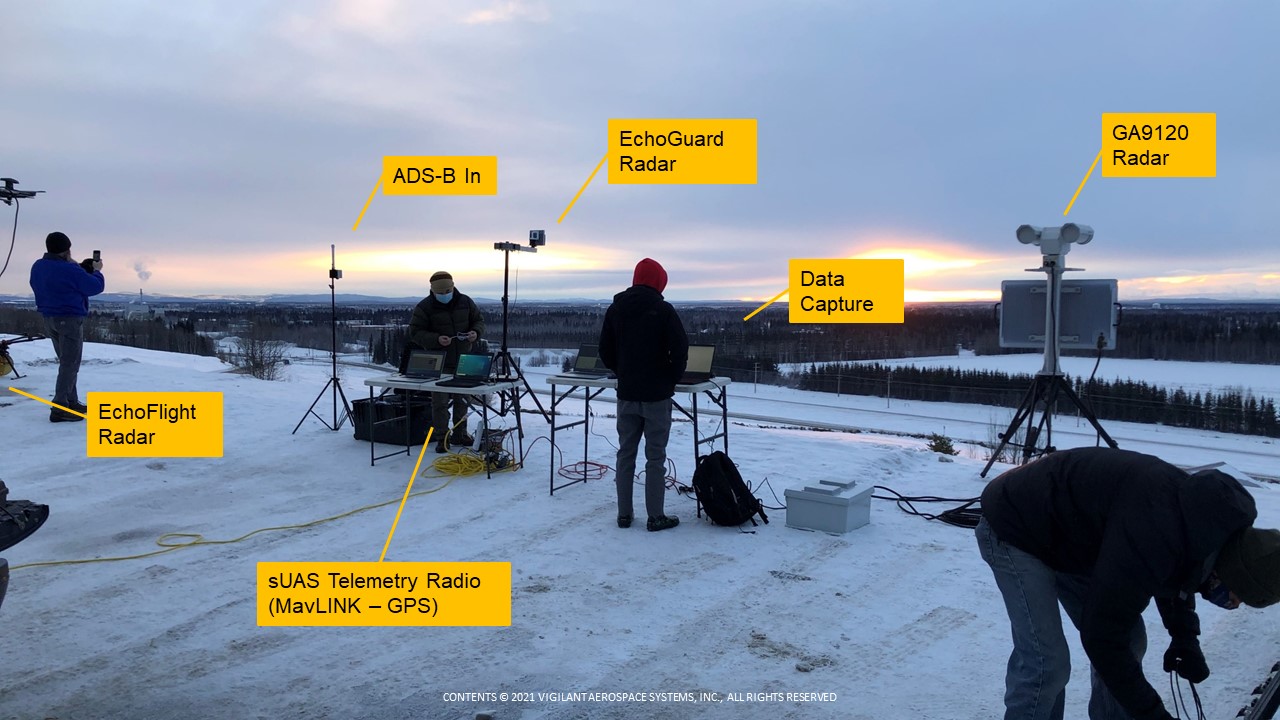
We have several sensors in the detect-and-avoid system with the sensors being used in parallel in order to provide side-by-side comparisons and to understand what happens with all of the data that is collected and put into the system, you would not typically have all of these components as a part of your detect-and-avoid system. So on the left-hand side, there is a radar that is attached to a drone. I’ll show you a better picture of that in a moment.
There is in the middle left here, a transponder receiver, your ADS-B system, that’s feeding data from manned aircraft transponders into the system. You have a telemetry link here in the middle, coming into one of the laptops. That’s running one copy of the detect-and-avoid system. It’s coming in directly from the unmanned aircraft. You have an EchoGuard radar. So it’s a small portable radar in the middle of the screen here, that’s feeding air traffic surveillance data as it sees aircraft into the system, you have multiple laptops that are being used for data capture in this case, because it’s a test. And then on the right-hand side, you have a larger GroundAware 9120 radar, that’s also being used in these tests. This is a picture of an onboard system.
FlightHorizion PILOT – Testing of Onboard Detect-and-Avoid
All the components that exist in the prior photo also exist in this photo. In this picture (below), you can see the FlightHorizon PILOT computer. This is a small single board computer that is running here, attached to the unmanned aircraft.

It’s the same software that’s running on the laptop. And the prior photo, you also can see here, you have an ADS-B receiver. That’s receiving transponder signals from a manned aircraft that are cooperative and providing those signals. You also have the onboard radar, that’s feeding data directly into the detect-and-avoid system. There is an inertial measurement unit attached to that inside that radar that provides information on where the radar is pointing and the motion of the radar, so that the tracking signal and data can be adjusted. And then you have direct telemetry from the onboard autopilot that’s feeding into the detect-and-avoid system to provide ownership data, including of course the GPS data and the location of ownership, so that avoidance is, can be calculated.
Recent Testing Projects
Quickly moving on here, we have some other photos from some recent testing you’ll see here on the left-hand side. We, again, have an unmanned aircraft and we have a GroundAware 9120 longer range radar that’s being used here. And we have been using that to attract both manned and unmanned aircraft.
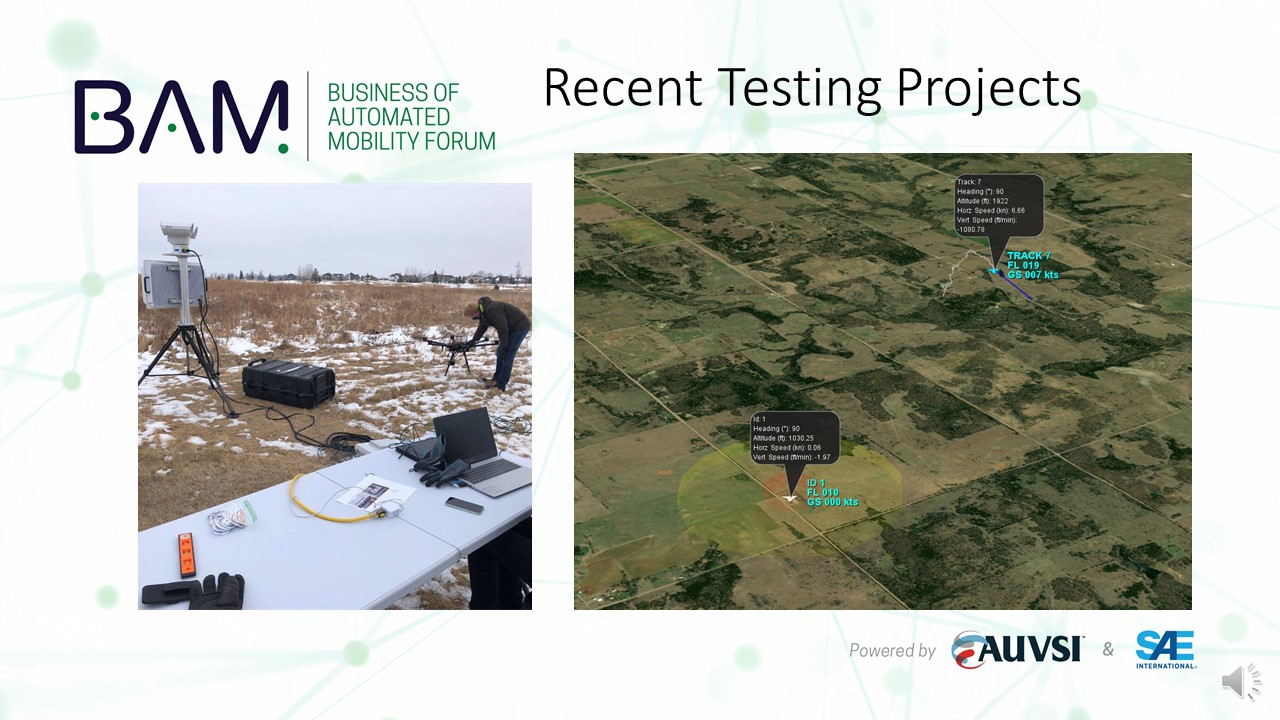
This was a test in which we were actually tracking unmanned aircraft to determine the accuracy and range and the ability of that radar to track smaller aircraft. On the right-hand side, you’ll see a screen in which, again, we have a 3D representation of the airspace. This is pulled directly out of the detect-and-avoid system.
You have your own ship aircraft, the small arrow on the lower left here with your near mid-air collision. Your NMAC [near mid-air collision] ring in red, and then your well clear ring in yellow in 3D there. That’s a visual representation of those distances that you’re required to maintain. On the right-hand side you can see there is a radar detected aircraft that is moving through the airspace that is being tracked by the system.
Here are some photos (below) from another interesting field test. On the left-hand side, you’ll see that there is an unmanned aircraft. This aircraft is carrying the detect-and-avoid system again, it has the onboard computer, it has the components and sensors, and this aircraft is flying in Alaska and preparing to fly under a waiver there using the whole integrated system to collect data.
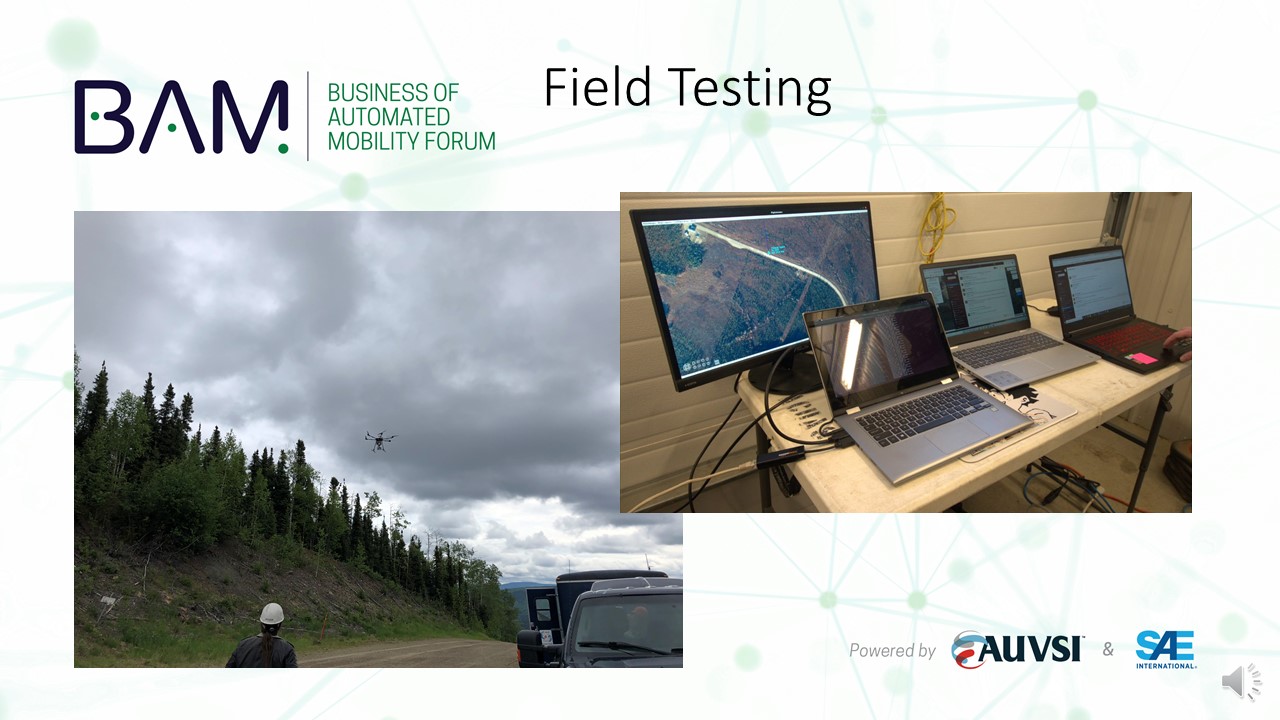
Also there are ground-based systems that are also collecting data. Related to that on the right hand side, you’ll see one of our testing stations where we have multiple laptops running, streaming data, displaying that data. One of those laptops, the one on the left there is running the detect-and-avoid system. You have that on the large screen, so you can see everything that it’s seeing from all of the sensors. And then we have additional laptops that are providing other functions, oftentimes what we are doing and what you do in these sorts of detect-and-avoid field tests is you are seeking multiple sources of truth.
You’re using information directly from the GPS on the manned aircraft that you may be encountering or using as a detect-and-avoid encounter aircraft to generate your warnings and make sure that your sensors are seeing the manned aircraft. So, you actually have a flight log and a GPS log, usually from one or more sources on the manned aircraft that you can then compare it to what your sensors saw. You can compare to what your software calculated.
You may also have sources of GPS locations of multiple unmanned aircraft that may be part of your encounter and other sources of data that can allow you to compare what your sensors saw and what your detect-and-avoid system said versus where the aircraft was located. This was great for adjusting your filters. This is great for being sure that you’ve aligned all of your systems correctly, that you’re using them correctly, and you’re doing your calculations correctly.
This is the kind of test that we really liked to perform because it really involves all of the components of the system, and is really the best demonstration of how a detect-and-avoid system works.
Industry and Regulatory Trends
Now, we’re going to talk a little bit about industry and regulatory trends to begin to explain how a detect-and-avoid system fits into a larger scheme for providing safety for beyond visual line of sight on manned aircraft flights. So there are certain trends currently emerging with detect-and-avoid systems.
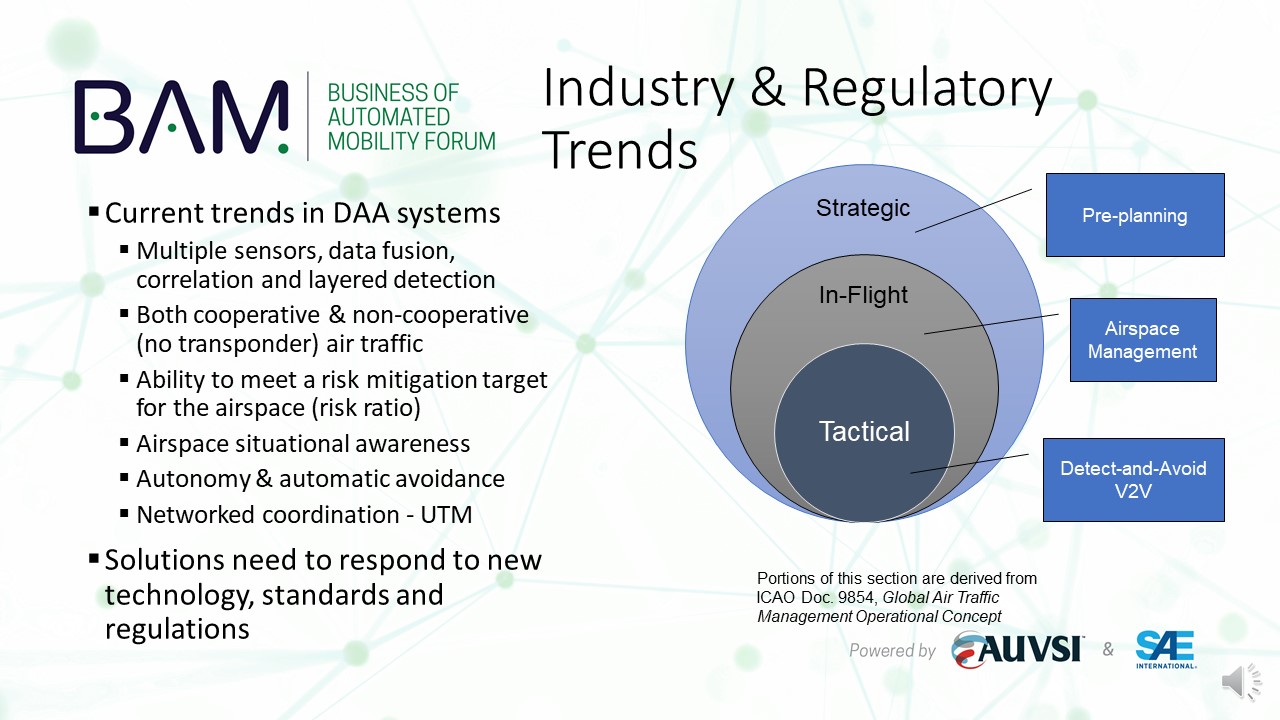
One of them, pretty obviously, our use of multiple sensors to be able to detect different types of aircraft at different distances and cooperative and non-cooperative aircraft. And, then the ability to fuse all that data together to correlate those signals so that you know that if you see an aircraft with multiple sensors, which are craft that is and fuse that into a single track. Then the ability to do later detection so that you are detecting things at the greatest range that you can and doing strategic avoidance first, and then in-flight coordination and avoidance as necessary, and then finally tactical avoidance.
Looking at this diagram on the right here, that’s derived from an IKO document. This is the idea that you do your pre-planning, you be sure that you know where your aircraft is and where it’s supposed to be in flight coordination, which will eventually be provided by systems like UTM and then tactical avoidance when necessary when you need to use your sensors to avoid conflicts. The ability to meet a particular risk ratio.
So your system must contribute a certain amount of risk mitigation to your flight operation at the tactical level is really important. That is emerging as a way to determine whether a detect-and-avoid system can meet a particular industry technical standard like the ones I was talking about earlier from ASTM, or from RTCA, and it’s an important measure of the effectiveness and usefulness of it detect-and-avoid system.
The other emerging trend that’s very important, of course, is increasingly autonomous systems. So detect-and-avoid systems that don’t just provide information, don’t just provide warnings, but actually provide an avoidance command that can be used by the autopilot. It can be supervised by a remote pilot, but can actually perform the command, send it to the autopilot, and provide a high level of autonomy. And then of course, soon we hope that we’ll have UTM systems that can provide additional coordination, and additional data from aircraft that otherwise might not be visible to a system.
All of those are very important industry trends, and all of them are building up to the ability to have first industry standards. What the system needs to do and what it needs to look like that can then become means of compliance to a particular rule. And, of course, the development of rules is a very important activity in the industry right now.
The other thing I’ll say about industry trends is the ability to respond to new technology is very important right now, there are new sensors, the sensors that exist are becoming more sophisticated. The software and algorithms are becoming more sophisticated. ACAS X is a major stride forward. And so the ability to respond is really critical for the development of effective detect-and-avoid systems, because there are technologies that I think are going to make them much more useful and efficient just over the next year or two.
Industry Next Steps
Finally, what are some industry next steps?
What are some things that you are likely to see over the next few months, and the next couple of years that are going to have a big impact on the unmanned aircraft systems industry, the ability of unmanned aircraft to fly beyond visual line of sight and the advancement of the economic impact of unmanned aircraft?
The first and probably one of the most important things is the FAA has announced the formation of an ARC (an Aviation Rulemaking Committee) to establish rules for the routine flight of unmanned aircraft beyond visual line-of-sight. This is an extremely exciting recent development – not unexpected. But, it’s great that it has started and is going to be going on to establish those rules.
Those rules will really lay the groundwork for everything else that comes after, and the ability to fly beyond visual line of sight routinely. The certification standards for the components and platforms, some of those exist and have been published, but some of those that are really critical for all the components and platforms really are still being written.
And, there’s a lot of work going on behind the scenes. I think those standards are going to be published over the next one to two years – a lot of the really critical ones. Then they will feed into the rules, so that’ll be an important process.
The establishment of the risk ratios that is detect-and-avoid system and other safety systems can contribute to the overall calculation of the safety of a flight is very important. That’s the type of testing I’ve described in this presentation that can help you build up to establish those risk ratios. That really drives a lot of the use of these types of systems.
Then getting into system assurance, trusted autonomy. NASA and FAA are both doing a lot of work on this – on how you establish the trust in these systems.
A lot of that is process-based. Some of it is test-based and there’s great work that’s emerging there. And then all of this is going to impact advanced air mobility, urban air mobility operations, and of course, delivery operations, whether those are Part 35, Part 135, or whether they exist under a different rule.
Those will all be the types of operations that are dependent on progress in detect-and-avoid, and then the use of detect-and-avoid in overall safety cases, and so we’re really looking forward to that.
Finally, of course, integration of remote ID and UTM into these systems to provide a lot more data and a lot more situations – a lot more urban situations and suburban situations that will allow unmanned aircraft to perform all kinds of services that they can’t perform now. But, we’ll be able to perform with much greater coordination. We’re very excited about that.
Thank you very much for watching my presentation. I appreciate your attention, and I hope that you found this information useful. We would, of course, welcome questions and you are welcome to contact us.
About the BAM Forum

In June 23-24, 2021, AUVSI and SAE teamed up to host the inaugural Business of Automated Mobility Forum with a very clear purpose: helping companies that are building the future of mobility create an actionable roadmap to success.
All sessions were recorded and are available On-Demand until September 22, 2021! If you were registered for the event, revisit the great content by logging in to the virtual platform. If you’d like to get access, click here to get access directly from the SAE website.
For more information on the BAM Forum event and session information, check out our blog post: “Vigilant Aerospace Presenting “Developing & Testing a Real-World BVLOS Multi-Sensor DAA System for sUAS at 2021 AUVSI BAM Forum”
 About SAE
About SAE
SAE International is a global association committed to advancing mobility knowledge and solutions for the benefit of humanity. By engaging nearly 200,000 engineers, technical experts and volunteers, we connect and educate mobility professionals to enable safe, clean, and accessible mobility solutions. We act on two priorities: encouraging a lifetime of learning for mobility engineering professionals and setting the standards for industry engineering. We strive for a better world through the work of our philanthropic SAE Foundation, including award-winning programs like A World In Motion® and the Collegiate Design Series™. More at www.sae.org.
About AUVSI
The Association for Unmanned Vehicle Systems International (AUVSI) — the world’s largest non-profit organization dedicated to the advancement of unmanned systems and robotics — represents corporations and professionals from more than 60 countries involved in industry, government and academia. AUVSI members work in the defense, civil and commercial markets. For more information, visit www.auvsi.org.
{kind=link}